Let’s start building!
Apologies for not having reported back for some time. We made a lot of progress on the design front in the last two weeks. I’m always excited to visit Casti because the gals always have a new prototype to share when I get there. On Saturday, Jim talked about using the KerK lead screw and by Wednesday, the gals had finagled an 80-20 version of the arm with all the pivots and slides working!
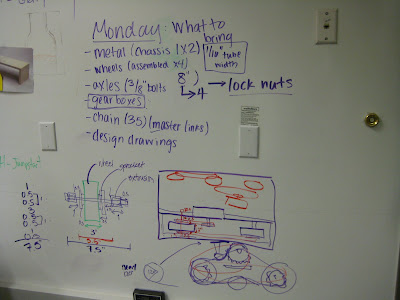
The game plan for the next week: Build the chassis with Jim and reassemble the kit chassis so that programming can work in parallel. This means we have to:
* Go buy all the materials that we need for Jim to start putting stuff together with us. This means a trip to Alan Steel on Monday, January 28 @ 3:00 pm. Caroline is putting together a cut list for 1X1 and 1X2 6061T6 aluminum square tube stock.
* Getting together a list of stuff to buy from Mcmaster for delivery by Monday. This includes long axles, flanged bearings to fit into the meccanum wheels, extra master chain links, extra sprockets and any other fasteners we would need.
* Planning and getting any long lead items like the 24” Kerk Motion Lead Screw (BZ8050T) through Mcmaster. This should be arriving next Friday. Eeek.
* Taking off the new stuff from the kit chassis i.e. the gear boxes and putting on previous years stuff so that we can start building the new chassis. While waiting for the new chassis to be built, we can experiment with the meccanum wheels as well.
* Start building this year’s electronics board. We can put it on a piece of corrugated plastic again. We should have this ready to go to hook up to all the motors before the chassis is done!
* We gotta start looking at our weight! Check out photos of the motors and wheels on the scale on our picasa site.
Chassis: I think the gals have settled on building a four-wheel drive chassis with four meccanum wheels. This should be really exciting and interesting this year. We took a look at what the frame should look like this year given the stack up of the 3” thick meccanum wheels and the associated sprockets and fasteners.
Jessa and Doug did some serious thinking on the driving code on Wednesday which is cool. I think it’s time to start coding up driving.c and getting the interrupts working while the Ann, Nandini and the build team work together to get the meccanum wheels and the kit chassis assembled.
Arm: Looks like we can do a power screw drive on an arm (third class lever – effort between fulcrum and load), which should give us more precision and less backdriving than with the usual sprocket and chain. I am concerned that we’ll need to be able to fold the arm back up at the end of a match when we take the robot off the field. We’ll be using the Taigene van door motor, and likely doubling the output speed to 100 RPM (since we only travel 0.5 inches per revolution of the nut). The Kerk Motion products triangular nut limits us to a 150 lb load, which at an 80% efficiency leaves us with 120 lb. We can probably safely place the pivot point at ¼ the length of the arm (20 lb at tip X 4 = 80 lbs at pivot, not including all the inefficiencies).
Serious math this weekend going on with David and Tiffany. I think David taught an entire statics class in an afternoon to the kids with a foam core prototype of the linkage. And then Eric pitched in working with Tobi to figure out how much load the lead screw could support.
Gripper: A bunch of our initial prototypes out of PVC and foam core helped us to understand just how gianormous this part needs to be. We’re struggling to figure out how two or three pronged gripper is going to start inside the starting dimensions (28X38X60). It needs two extra layers of actuation just to do this (passive or active I do not know). I think our goal is to get the chassis and the arm up and running soon and then develop and attach the gripper separately at the end.

We have 26 days left (19 days in). I am definitely feeling the pressure to move towards building! Thanks to all the parents and mentors for their support!
Emily
posted by HomogeneousTransform at 11:19 PM
![]()

0 Comments:
Post a Comment
<< Home