Onwards and upwards!
Apologies for not having blogged in a really long time. We’ve made a lot of progress albeit some pretty interesting setbacks, which is expected in all programs of this sort. I definitely think that experiencing a setback, dealing with it emotionally and moving on is an excellent experience for anyone to have at an early age. One of the other mentors mentioned something – we all learned to walk when we were babies by falling down. Some of the girls are lucky enough to have gone through elementary and secondary school without having to really try, and have perhaps forgotten the feeling of learning to walk by falling down and picking oneself up. The first time one falls again comes as a hard thud and then we learn that it is part of growing again. I’m excited because I saw it happen in the last ten days and everyone is on a roll again. This is perhaps lesson that a smart young woman can learn from being part of this robotics team – I value it above learning the technical aspects of robot building.
Here’s where we are in terms of robot building . . .
Chassis: Hahaha. I was banging my head against a wall on Friday evening after Mark Siminoff (senior IDEO engineer and leader) came and pointed out that Jim and I needed to drive all the mecanum wheels independently. Jim and I had run ahead and set up the mecanum wheels as if they were regular wheels in tank steering style. Once I drew the free body diagram, I realized where we had gone astray. No big deal. We tested out the tank steering on Saturday afternoon with some simple button driven drive code that Caroline and Erin worked with me to write (press a button to determine direction and the amount of joystick tilt determines magnitude). The chassis sounds like the mouse that roared with the mecanum wheels!
As of Wednesday, we have the chassis hooked up for four wheel drive. We had an extra two gearboxes which we bought for backup, but are using now. Caroline, Sherri and Erin put together drive code that we almost got working today. I think we need to cut the fat from their code i.e. strip all the default code examples because something is overwriting their PWM outputs. I think they are close though. I’m excited to see them ‘close the loop’ with the system finally. Thanks to Jessa and Karlin for their support of the programming team!

Arm: Alas, Kerk Motion Products has not been nice to us. I accomodated Jimmy’s enthusiasm by working out a deal with Mcmaster to get a 24” teflon coated lead screw (four starts, two turns per inch). However, Kerk, even after Mcmaster requested that they ship overnight, shipped the damn lead screw via ground. So it is currently somewhere between New Jersey and Chicago on a truck. And I ordered it on January 22! In any case, we’ve purchased a backup acme precision lead screw and nut from Mcmaster that should arrive tomorrow to drive our arm.
Meanwhile, Nandini and Anne did a superb job of putting together an ACTUATED arm prototype which they built out of 80-20 and piano hinges. I am really impressed with their ability to make the leap into prototyping. This is the first time I’ve seen in four years a build team proactively hooking up an actuator to their mechanism and driving it. How cool. In the process, we learned that we need to gear up (speed up) the follower sprocket on the lead screw. The motor currently runs at 45 RPM = 0.75 revs per second. For 0.5 inches per rev, it takes us forever to go up 20 inches, 30 seconds precisely, which is like the majority of the 2.5 minute game. So, we’re planning to gear up at least by a factor of four (down to eight seconds of travel), if not a factor of six (five seconds of travel). We have plenty of torque (limited by the 150 lb load that the lead screw nut can take). Nandini and Anne worked out the lead screw problem on the whiteboard.

Today, Jim and the gals got their heads around some of the issues in building the tower to support the arm. A lot of it was about geometry, and part of it was about what to choose as a material. Do we use 1X1X1/8” wall thickness aluminum or 1/16” wall thickness? Jim put lengths of both material in a vice and hung 10 lb weights off the end of the lengths. Everyone got a chance to push down on the cantilever beam and develop an intuitive sense of bending stiffness and strength. This is what I mean by intuitive engineering!

Gripper: Kudos to Tiffany Card for working with the girls this weekend on ProE to get a better sense of a number of gripper mechanisms and methods of actuation. I think we’re still looking at both linear and rotation actuation as well as grippers that have appendages that move in parallel or pivot about a point.
Once we have the arm and the tower set up, I think we can build on top of it pretty easily. Certainly this is not necessary how I would lead an internal IDEO program, but having accepted and come to terms with the sculptural aspect of robot building, I’m pretty excited and have a lot of faith that the intuitive that the build team and the mentors have developed via PCV and foam core prototypes will really help to inform us in the final design as we ‘sculpt’ it.
Electronics: Big cheers to Doug Bourn for helping us swap the SMT resistors on the bad gear tooth sensor board. It was great for Erin, Neli, Ginna and Arushi to watch Doug use solder wick and pop those tiny resistors off the PCB and swap them. We did get both GTS sensors working and the group of us hooked everything up to a power supply and watched the pulse on the oscilloscope on Monday.
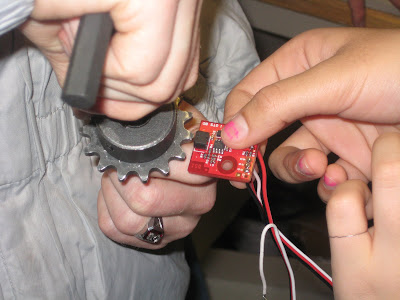
Neli and Ginna also learned how to strip wire and crimp on lugs and today, Ginna and Doug built a control box for switching in and out of autonomous. I think Neli and Ginna are well on their way to helping us put together a well organized electronics board this year (which we really need to do – our pile of wires is starting to get a little scary).

Anyhow, things are going well with 12 days left. This being my third time through it, I think the emotional rollercoaster is a lot more predictable now. I hope that the girls are learning this too!
Can’t wait until the lead screws are delivered tomorrow morning. Robotics is really my excuse to geek out, code, build stuff, and tinker without the heavy responsibility of running a program at work. Thanks to everyone for your patience, generosity, support and food!
Don’t forget to check out our photo gallery here:
http://picasaweb.google.com/castilleja.robotics
posted by HomogeneousTransform at 10:56 PM
![]()

0 Comments:
Post a Comment
<< Home