Why I coach these girls . . .

posted by HomogeneousTransform at 11:22 AM
|
0 comments
![]()
Apologies for not having blogged in a really long time. We’ve made a lot of progress albeit some pretty interesting setbacks, which is expected in all programs of this sort. I definitely think that experiencing a setback, dealing with it emotionally and moving on is an excellent experience for anyone to have at an early age. One of the other mentors mentioned something – we all learned to walk when we were babies by falling down. Some of the girls are lucky enough to have gone through elementary and secondary school without having to really try, and have perhaps forgotten the feeling of learning to walk by falling down and picking oneself up. The first time one falls again comes as a hard thud and then we learn that it is part of growing again. I’m excited because I saw it happen in the last ten days and everyone is on a roll again. This is perhaps lesson that a smart young woman can learn from being part of this robotics team – I value it above learning the technical aspects of robot building.




posted by HomogeneousTransform at 10:56 PM
|
0 comments
![]()
Apologies for not having reported back for some time. We made a lot of progress on the design front in the last two weeks. I’m always excited to visit Casti because the gals always have a new prototype to share when I get there. On Saturday, Jim talked about using the KerK lead screw and by Wednesday, the gals had finagled an 80-20 version of the arm with all the pivots and slides working!

posted by HomogeneousTransform at 11:19 PM
|
0 comments
![]()
My favorite days mentoring are those that involve a little bit of everyone – something mechanical, something electrical and something involving programming. It reminds me of the complexity of the problem these girls are trying to solve and how much fun a multifaceted problem really is.
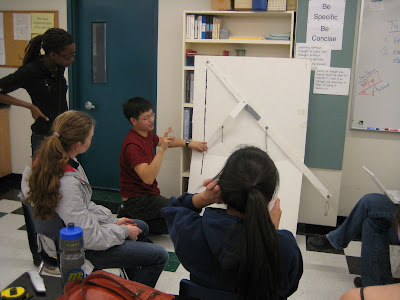
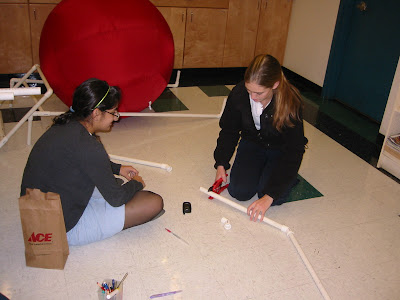
Jessa, Doug, David and I were there today. The teams have made some excellent progress on all accounts. Annie and Divya took my homework assignment seriously and actually built a small scale model of not only the overpass but of the mechanism they have been thinking about for lifting the ball out of popsicle sticks and a baseball to represent the game piece. These gals are smart. Real smart. I was also touched that Sherri and Caroline took it upon themselves to build a gripper out of PVC. I really do suspect that once we show them a way to prototype or a way to do things, the exposure is enough for them to take it and run with it. It’s getting over the hurdle of knowing what to do that is hard. I don’t think they suffer very much from what Bob Sutton calls the ‘knowing-doing’ gap.
For dinner entertainment, I pulled up a few sketches in Solidworks to try to explain four bar linkages to the kiddos as it applies to designing their lift. I emphasized that Solidworks is a tool to help them make decisions and I think that using the 2D sketching features would benefit them greatly in figuring out some of the geometries they are trying to build. Jimmy and I had a good working discussion today over lunch (as he was waiting to get through online to get burning man tickets nonetheless) and we’re interested in some sort of four-bar linkage or scissor lift. David brought up the extendable ladder mechanism which I think we can do easily with a winch. He also had a good point about those great drawer tracks you can get from home depot. Perhaps we can use drawer tracks along with one side of the scissor lift to give it some stability, especially near the load. More later on this.
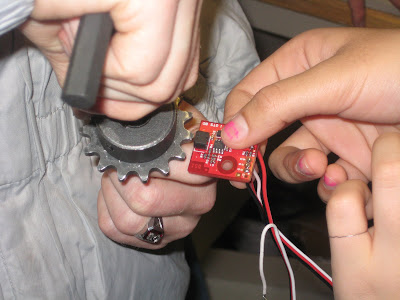
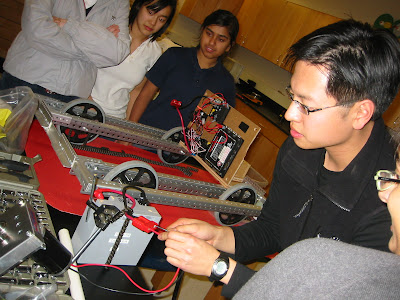
While David coached Ann and Nandini on the prototype chassis assembly, Doug and I chatted with the gals about a few important electronics / programming topics including PWM and duty cycle, how moving the joystick translates to a motion in the chassis, and some ways to work around the over responsiveness of Scottie (last year’s robot). Driving Scottie, I suspect, is a bit like trying to fly a helicopter. Scottie was EXTREMELY sensitive because, to my awe and surprise, apparently the girls took the input signal from the joystick, CUBED it (took it to the power of 3 / talk about serious processing meltdown) and then divided it again by some number. Doug then had a great point about using a lookup table instead, so you are guaranteed with an output within your boundary conditions and a lot quicker processing. Doug and I also talked about using an accumulator and other time-based strategies to reduce noise in the signal.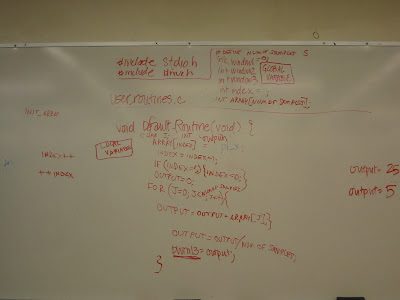
We also sat down and wrote code on the board. Mentors who are interested in coding, please let me know and I will get you a copy of the compiler and default code. I can walk you through the default code (it is messy). Albeit the big family of c and h-files, the girls should only be concerned with modifying user_routines.c and user_routines_fast.c (for autonomous / hybrid period). In the context of programming an accumulator, we talked about global variables, constants and arrays. I actually think we should encourage them to work on categorizing their functions into library files like driving.c / driving.h, lift.c / lift.h and gripper.c / gripper.h so the components can be developed by separate coders and then incorporated into the program. Then default_routine (void) as a function can be kept very simple and clean. I would actually like one of us to strip user_routines.c down to the foundation so that all this extraneous code doesn’t overwhelm the kids.
This was definitely a good day. We have momentum. I know the kiddos are worried about not having designs locked down yet and feel behind, but heck, neither does my project at work! We’ll figure it out soon. I’ll be there Saturday. See everyone there!
posted by HomogeneousTransform at 10:38 PM
|
0 comments
![]()


posted by HomogeneousTransform at 10:11 PM
|
0 comments
![]()
Thank you to all the Mentors and parents who have worked so hard over the past 3 days - even missing the NFL Conference Games - to build the Rack and the Crate. Doug, David, George, George, Richard, Beth, Debbie - you rock!
posted by heidi at 9:35 PM
|
0 comments
![]()
The 2007 FIRST season is in full swing, and our Gatorbotics team is working hard. Parents, you can check here for the latest schedules etc. Just click on the links on your right to find out what each sub team is up to!
posted by heidi at 5:23 PM
|
2 comments
![]()
